目录
1.中断处理
2.Event机制
3. 资源管理
3.1 访问被占用资源的行为
3.2 同步机制常见问题
1.优先级反转
2.死锁(deadlocks)
3.3 优先级天花板协议
3.4 中断层级的天花板协议
4 Alarm
4.1 counters
4.2 Alarm 管理
书接上回 OSEK.html" title=OSEK>OSEK OS介绍(一)
下面我们聊聊OSEK.html" title=OSEK>OSEK OS的中断处理、Event机制、资源管理和alarm。
1.中断处理
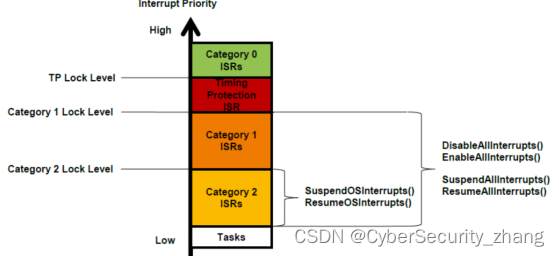
在OSEK.html" title=OSEK>OSEK OS中,中断被分为两种:
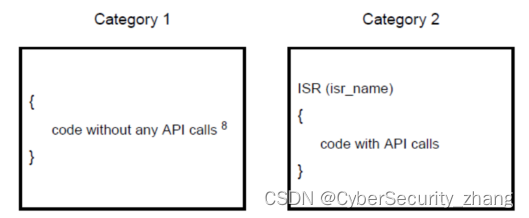
看,是不是OSAR.html" title=AUTOSAR>AUTOSAR也继承了这个机制,下图是Vector MicroSAR OS关于中断是分类:
其中,1类中断直接从中断向量表里调取;在startOS之前应该启动激活1类中断,具体时序如下:
Os_InitMemory() > Os_Init()(初始化基础中断控制器配置) > 通过直接操作中断控制器中的控制寄存器来启用第一类isr的中断源 > 直接操作全局中断标志和/或当前中断优先级来启用中断,以允许第一类isr;
注意哦,中断由硬件调度,task由调度器调度
2.Event机制
在OSEK.html" title=OSEK>OSEK OS中,Event机制是一种同步机制,只会在extended task中提供;并且保证waiting态的task可以进行状态迁移。
下图为抢占式任务和非抢占式任务面对事件发生的同步机制

其中,Task T1优先级高于T2,T2设置一个事件通知了T1,如果是T1是抢占式,那么T1的状态会有waiting切换至running,T2由running切换至Ready;之后T1运行,清除事件,恢复到waiting态;T2继续由ready态切换至running运行。
3. 资源管理
资源管理用于协调多个具有不同优先级的任务对共享资源的并发访问,如调度器、程序顺序、内存访问等。资源管理保证了
3.1 访问被占用资源的行为
OSEK.html" title=OSEK>OSEK OS规定了优先级天花板协议,因此不会出现任务或中断试图访问被占用资源的情况。如果在一个任务中占用多个资源,用户应按照后进先出原则请求和释放资源。
某一task不希望被抢占时,通常它会锁定调度器(scheduler)。
3.2 同步机制常见问题
1.优先级反转
信号量的使用通常会导致优先级反转;

如上图所示
优先级排序:T1>T2>T3>T4
T4运行时访问信号量S1,此时T1抢占了T4进入到运行态,由于S1被T4占用,因此T1无法访问S1,T1从running态进入到waiting态等待S1释放;由于T2、T3不访问S1,且优先级高于T4,所以会先运行T2、T3、T4,T4运行完毕后释放S1,T1才会由wait进入到running;对于这种情况OSEK.html" title=OSEK>OSEK使用天花板协议来避免优先级反转。
2.死锁(deadlocks)

死锁是指由于无限等待相互锁定的资源而无法执行任务。如上图所示:
T1在运行时访问并占用信号量S1,由于等待一个event从而进入wait态;因此,处于ready态的T2进入runing态,占用信号量S2;如果此时优先级高的T1对应的event发生,进入到runing态,并且需要访问信号量S2,但是S2被占用,因此进入到wait态;T2运行需要访问信号量S1,因此也进入到wait态;两个task无限等待对方占用的信号量从而无法继续执行,导致了死锁。
3.3 优先级天花板协议
- 每个资源的最高优先级应低于不访问资源的所有任务最低优先级,并且其优先级高于访问资源的所有任务的最高优先级。
- 如果task需要资源,并且其当前优先级低于资源的最高优先级,则task的优先级应暂时提高到资源的最高优先级
- Task释放资源,优先级应退回到当前任务优先级
天花板协议可能会导致低于资源优先级的task延迟;下图为天花板协议机制

T0具有最高优先级,T4优先级最低。T1和T4想访问相同资源,该系统清楚地表明,不需要无限优先级反转。高优先级任务T1等待的时间比T4占用资源的最大持续时间短。T4先运行,此时请求资源,该任务优先级提高至天花板,不会被其他应用抢占,运行完后释放资源,优先级降至最低;此时T1开始运行,请求资源。
3.4 中断层级的天花板协议
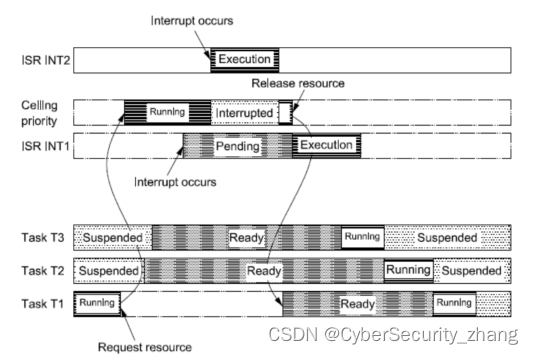
可抢占的T1正在运行,同时请求中断INT1的共享资源;T1激活了更高优先级的T2\T3。此时由于天花板协议的存在,T1继续运行不会被抢占。INT1中断产生,由于天花板优先级高于INT1,因此INT1会被pending,T1继续运行;此时INT2产生,由于该中断优先级高于天花板优先级,因此T1被打断,INT2处理完成后T1继续运行,最后释放资源,INI1运行,T1被打断,INT1完毕后释放资源;T1优先级已经降至最低,因此会运行T3->T2->T1。
4 Alarm
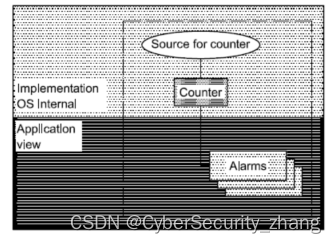
Alarm用于处理定期事件,例如以固定间隔提供中断的计时器,或轴上的编码器,在(凸轮轴或曲轴)角度不断变化的情况下生成中断。OS提供了两个阶段的概念来处理此类事件。定期事件由特定的计数器触发。基于计数器,OS为应用程序软件提供报警机制。
4.1 counters
计数器由一个计数器值和一些特定于计数器的常数表示,该值以“ticks”为单位。
OS负责管理计数器进位时的报警以及计数器进位方式的必要操作。
OS至少提供一个从(硬件或软件)计时器派生的计数器
4.2 Alarm 管理
当Alarm触发时,OS提供激活任务、设置事件或调用警报回调例程的服务。
Alarm在OS生成时静态分配给一个counter、task或者alarm-callback。依赖于配置,当alarm超期时,event或者task或者callback应该被激活或者调用。

![Docker安装部署[8.x]版本Elasticsearch+Kibana+IK分词器](https://img-blog.csdnimg.cn/4799bbdbe3fd4fb582f76d1761f09ea7.png#pic_center)